Improved Tilt Pan Camera Control For The Robot Tank
2019-08-12 - By Bhushan Dandekar, Rohit Gidda, Kaviya Kuncheria, Robert Elder
Introduction
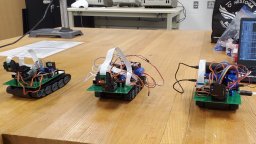
The purpose of this article is to review the results of a project undertaken by Bhushan Dandekar, Rohit Gidda, and Kaviya Kuncheria. The primary goal of the project was to improve the software integration of a cheap tilt/pan camera mount that would be placed on a toy robot tank.
The tilt/pan camera mount used in this project was a cheap eBay model that was purchased for $5.00 CAD.
Results
The students also produced a detailed report discussing their work on the project. In their report, they discuss how to control the servo motors using a PWM signal with a variable duty cycle. They also outline the process that was used to remotely stream from the Raspberry Pi Camera.
Servo Control
Here is the example code they used for controlling the servo motors:
# File Name : servoCamera.py
# Description : Movement of the camera on the servo-mount and video streaming
# Author: : Group F
# Date: : 2019-05-28
#Import libraries
import RPi.GPIO as gpio
import time
from picamera import PiCamera
import sys
import termios
import tty
gpio.setmode(gpio.BOARD) #Enable the all gpio pins
gpio.setwarnings(False) # Clear gpio pins
gpio.setup(12,gpio.OUT) # setup particular pin for PWM
gpio.setup(10,gpio.OUT) # setup particular pin for PWM
p=gpio.PWM(10,50)
p.start(6.5) # set the duty cycle to 50%
q=gpio.PWM(12,50)
q.start(6.5) # set the duty cycle to 50%
camera = PiCamera()
def getch():
fd = sys.stdin.fileno()
old_settings = termios.tcgetattr(fd)
try:
tty.setraw(fd)
ch = sys.stdin.read(1)
finally:
termios.tcsetattr(fd, termios.TCSADRAIN, old_settings)
return ch
# FUNCTION : gpioInit
# DESCRIPTION : The initialize gpio pins
# PARAMETERS : void
# RETURNS : Nothing
def gpioInit():
gpio.setmode(gpio.BOARD)
camera = PiCamera()
gpio.setup(7,gpio.OUT)
gpio.setup(19,gpio.OUT)
gpio.setup(13,gpio.OUT)
gpio.setup(15,gpio.OUT)
# FUNCTION : pwmUpperStart
# DESCRIPTION : controlling the forward speed of the servo motors
# PARAMETERS : duty cycle
# RETURNS : change in duty cycle
def pwmUpperStart(dutyCycle):
pwmInit()
duty=dutyCycle
q.ChangeDutyCycle(duty)
# FUNCTION : pwmLowerStart
# DESCRIPTION : controlling the backward speed of the servo motors
# PARAMETERS : duty cycle
# RETURNS : change in duty cycle
def pwmLowerStart(dutyCycle):
pwmInit()
duty=dutyCycle
p.ChangeDutyCycle(duty)
# FUNCTION : pwmInit
# DESCRIPTION : Enables the pulse width modulation pulse
# PARAMETERS : void
# RETURNS : Nothing
def pwmInit():
gpio.setmode(gpio.BOARD)
gpio.setup(12,gpio.OUT)
gpio.setup(10,gpio.OUT)
# FUNCTION : reset
# DESCRIPTION : All peripherals going back to default condition
# PARAMETERS : void
# RETURNS : Nothing
def reset():
time.sleep(.01)
# FUNCTION : stop
# DESCRIPTION : To stop servo motors from rotation
# PARAMETERS : Integer type value that raise the the signal to low for stop rotating servo motor
# RETURNS : Nothing
def stop():
gpioInit()
gpio.output(7,0)
gpio.output(19,0)
gpio.output(13,0)
gpio.output(15,0)
print("stop")
# FUNCTION : forward
# DESCRIPTION : The forward servo motors start rotating
# PARAMETERS : Integer type value that raise the the signal to hight for rotating servo motor
# RETURNS : Nothing
def forward():
gpioInit()
gpio.output(7,1)
gpio.output(19,0)
gpio.output(13,1)
gpio.output(15,0)
print("forward")
time.sleep(0.1)
stop()
# FUNCTION : backward
# DESCRIPTION : The backward servo motors start rotating
# PARAMETERS : Integer type value that raise the the signal to hight for rotating servo motor
# RETURNS : Nothing
def backward():
gpioInit()
gpio.output(7,0)
gpio.output(19,1)
gpio.output(13,0)
gpio.output(15,1)
print("backward")
time.sleep(0.1)
stop()
# FUNCTION : right
# DESCRIPTION : The right side of servo motors start rotating
# PARAMETERS : Integer type value that raise the the signal to hight for rotating servo motor
# RETURNS : Nothing
def right():
gpioInit()
gpio.output(7,0)
gpio.output(19,1)
gpio.output(13,0)
gpio.output(15,0)
print("right")
time.sleep(0.1)
stop()
# FUNCTION : left
# DESCRIPTION : The left side of servo motors start rotating
# PARAMETERS : Integer type value that raise the the signal to hight for rotating servo motor
# RETURNS : Nothing
def left():
gpioInit()
gpio.output(7,0)
gpio.output(19,0)
gpio.output(13,0)
gpio.output(15,1)
print("left")
time.sleep(0.1)
stop()
# FUNCTION : lowerServoMiddle
# DESCRIPTION : The lower middle servo motor work begins
# PARAMETERS : Integer type value that provide servo for some moment to particular angle
# RETURNS : Nothing
def lowerServoMiddle():
pwmLowerStart(6.5)
print("lowerServoMiddle")
# FUNCTION : lowerServoLeft
# DESCRIPTION : The lower left servo motor work begins
# PARAMETERS : Integer type value that provide servo some moment to particular angle
# RETURNS : Nothing
def lowerServoLeft():
pwmLowerStart(14)
print("lowerServoLeft")
# FUNCTION : lowerServoRight
# DESCRIPTION : The lower right servo motor work begins
# PARAMETERS : Integer type value that provide servo some moment to particular angle
# RETURNS : Nothing
def lowerServoRight():
pwmLowerStart(2.5)
print("lowerServoRight")
# FUNCTION : upperServoMiddle
# DESCRIPTION : The upper middle servo motor work begins
# PARAMETERS : Integer type value that provide servo some moment to particular angle
# RETURNS : Nothing
def upperServoMiddle():
pwmUpperStart(6.5)
print("upperServoMiddle")
# FUNCTION : upperServoLeft
# DESCRIPTION : The upper left servo motor work begins
# PARAMETERS : Integer type value that provide servo some moment to particular angle
# RETURNS : Nothing
def upperServoLeft():
pwmUpperStart(14)
print("upperServoLeft")
# FUNCTION : upperServoRight
# DESCRIPTION : The upper right servo motor work begins
# PARAMETERS : Integer type value that provide servo some moment to particular angle
# RETURNS : Nothing
def upperServoRight():
pwmUpperStart(2.5)
print("upperServoRight")
bol=True; #if condition is true proceed
try: # To handle the exceptions
while bol:
direct=getch() #getting the commands from the ASCI keyboard
if direct=='w': #getting the forward commands from the ASCI keyboard word 'w'
forward()
elif direct=='s': #getting the backward commands from the ASCI keyboard word 's'
backward()
elif direct=='a': #getting the left commands from the ASCI keyboard word 'a'
left()
elif direct=='d': #getting the right commands from the ASCI keyboard word 'd'
right()
elif direct=='i': #getting the upper left commands from the ASCI keyboard word 'i' for the servo motor
upperServoLeft()
elif direct=='o': #getting the upper middle commands from the ASCI keyboard word 'o' for the servo motor
upperServoMiddle()
elif direct=='p': #getting the upper right commands from the ASCI keyboard word 'p' for the servo motor
upperServoRight()
elif direct=='j': #getting the lower left commands from the ASCI keyboard word 'j' for the servo motor
lowerServoLeft()
elif direct=='k': #getting the lower middle commands from the ASCI keyboard word 'k' for the servo motor
lowerServoMiddle()
elif direct=='l': #getting the lower right commands from the ASCI keyboard word 'l' for the servo motor
lowerServoRight()
elif direct=='c': #getting the capture mode commands from the ASCI keyboard word 'c'
camera.start_preview()
time.sleep(2)
camera.capture('/home/pi/Desktop/group1.jpg')
camera.stop_preview()
elif direct=='v': #getting the camera preview commands from the ASCI keyboard word 'v'
camera.start_preview() #start the preview of the camera
camera.start_recording('/home/pi/Desktop/group1.h264')
time.sleep(15)
camera.stop_recording()
camera.stop_preview() #stop the preview of the camera
elif direct=='b': #getting the reset commands from the ASCI keyboard word 'b'
gpio.cleanup()
bol=False
except KeyboardInterrupt: #if any other ASCI character press it interrupts the command
gpio.cleanup()
Remote Camera Viewing
The team made use of the streaming server code described in section 4.10. Web streaming of the Picamera documentation.
 All About SD Card Flash Memory Corruption in Cameras & Raspberry Pis
Published 2019-04-22 |
 Buy Now -> |
 Monitoring of Plant Growth on a Budget With Arduino
Published 2018-08-20 |
 Can You Build a Streaming Video Robot Tank for ~$100?
Published 2018-09-01 |
 Automated Plant Watering With Arduino
Published 2018-12-22 |
 A PCB For The Robot Tank
Published 2018-12-24 |
 A Cheaper PCB For The Robot Tank
Published 2019-08-12 |
 Robot Tank Quality Assurance & Design Evaluation
Published 2021-05-09 |
| Join My Mailing List Privacy Policy |
Why Bother Subscribing?
|